Release v0.4 - Augmented Reality

Hello everybody,
First of all thank you for your comments, is nice to have feedback. And special thanks to Joe Parisi for his help!
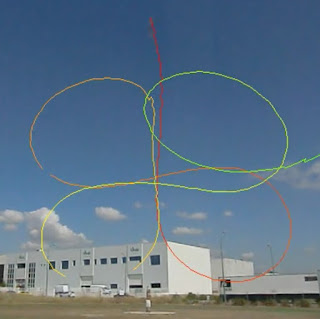
Many of you asked for some references in the video, so I have been working in a new version that makes a big step forward. This version makes use of augmented reality functions to find how and where the camera was placed with respect to the circle and draw any reference in the image. As a side result, it is also useful to remove distortion of wide angle cameras due to the required camera calibration.
Let's see an example:
This new version can work the same way as previous ones, using distortion correction only or using distortion correction and references.
In order to use the correction and references, it is necessary to calibrate the camera. Another program is included in the file called CamCalibration. This program takes an special video as an input and saves a .npz file with the camera parameters.
The video mentioned must be made with the same camera and configuration that is used for flight videos, and must show different perspectives of this pattern:
https://markhedleyjones.com/storage/checkerboards/Checkerboard-A4-25mm-10x7.pdf
This is an example video, the duration should be similar, 30-50s. Following calculations will take long if a long video is used:
As a result, this program saves a .npz file that will be used in the main program and two undistorted images. If those images show straight lines and good symmetry our chances are good. This is the result of an action camera distorted video:

Back to the main program, VideoF2B. After start it will ask for the previous .npz file of the camera used for the flight video. If you cancel this dialog, the program will work the same as v0.3.
If the file is loaded, it will ask for line length (including arm and half wingspan) and distance of the height markers to the circle center. This markers are per FAI rules, at 1.5m height, spaced 45 degrees and usually in a 25 m radius circle.
After that, a new window opens asking the user to click in the reference points. See the example video. If you close this window, the program will continue using only distortion correction.
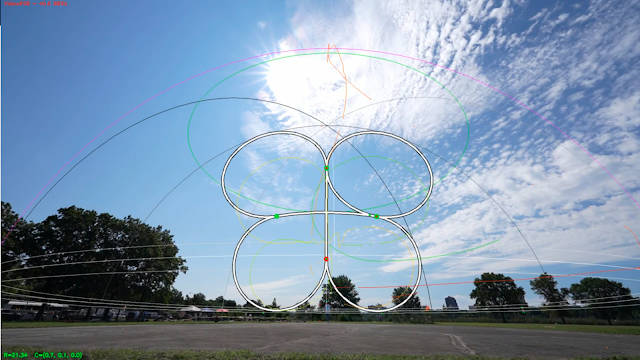
If all went well, the flight video with references will be shown. You can rotate the sphere with the arrow keys, delete the track with space, or recalibrate references with 'c'. The output video will be saved in the folder of the input video.
I know this version is more complex to use, I have done my best to keep it as simple as posible but the problem itself is not easy. There are readme files included for both programs with more detailed instructions.
Next logical step is to include the maneuvers shape, stay tuned.
Hope you enjoy,
Alberto Solera
Thank you for your dedication. It is realy very usefull for comunity.
ReplyDeleteI'm thinking to make a championship via internet, where anyone can send the video and we analise the flight using your app. Thanks a lot!
Thank you for your words, Good idea!
Delete